
摘要
导航系统作为航空电子系统的重要组成部分,是保障飞行器安全、精确、高效运行的核心支撑。随着航空航天技术的发展,现代飞行器已逐步从单一导航模式向多源融合、智能自主的综合导航体系演进。本文综述了当前飞行器所采用的主要导航方式,包括惯性导航系统(INS)、卫星导航系统(GNSS)以及基于数据融合的组合导航系统,重点分析其工作原理、技术特点、应用领域及关键问题。同时,结合民用与军用航空的实际需求,阐述了VOR、ILS、ADS-B等典型导航辅助手段的功能与演进方向。特别针对战斗机在高机动飞行条件下的导航稳定性问题,深入探讨了环形激光陀螺(RLG)与光纤陀螺(FOG)等先进惯性器件的技术优势与发展趋势。
关键词:航空电子;导航系统;惯性导航;卫星导航;组合导航;环形激光陀螺;ADS-B
1 引言
航空电子系统(Avionics System)是现代飞行器实现飞行控制、任务执行、态势感知和安全运营的技术基础。在众多子系统中,导航系统(Navigation System)承担着确定飞行器实时位置、速度与姿态的关键职责,被誉为飞行器的“定位之眼”与“路径指南”。随着航空器任务复杂度不断提升——从传统民航运输到高空高速隐身作战、从有人驾驶到无人机自主飞行——对导航系统的精度、可靠性、抗干扰性和环境适应性提出了前所未有的挑战。
20世纪以来,航空导航经历了从地标导航、无线电导航到惯性/卫星组合导航的重大跨越。尤其是进入21世纪后,随着全球导航卫星系统(GNSS)的成熟与综合模块化航电(IMA)架构的普及,导航系统已不再是独立功能单元,而是深度融入飞行管理、任务规划、数据链通信与自主决策的核心节点。在民用领域,新一代空管系统(如NextGen、SESAR)依赖高精度导航实现点对点自由航路飞行;在军事领域,第五代战斗机在GPS拒止环境下仍需维持厘米级定位能力以支持精确打击与编队协同。
因此,系统性梳理现代导航技术的分类、原理与发展现状,不仅有助于理解当前航电系统的运行机制,也为下一代智能导航系统的研发提供理论依据和技术方向指引。本文聚焦于航空电子系统中的导航技术,涵盖主要导航方式、关键器件、典型应用及前沿趋势,构建完整的技术图谱。
2 主要导航技术类型
现代飞行器通常采用多种导航技术并行工作,形成互补与冗余。根据信息来源与工作机理的不同,可将其划分为三类主要导航方式:惯性导航(INS)、卫星导航(GNSS)与组合导航系统。以下将分别介绍其原理、性能指标及典型应用场景。
2.1 惯性导航系统(INS, Inertial Navigation System)
2.1.1 基本原理
惯性导航是一种完全自主、不依赖外部信号的导航方式,其基本原理基于牛顿运动定律。系统通过测量飞行器在三个正交轴向上的加速度和角速度,经过时间积分运算,推算出速度、位置和姿态的变化。
核心部件包括:
陀螺仪(Gyroscope):测量角速度,用于确定飞行器的姿态变化(俯仰、滚转、偏航)。
加速度计(Accelerometer):测量线加速度,经坐标变换后积分可得速度与位移。
数学模型如下:

2.1.2 技术优势与局限性
典型的误差来源包括:
传感器零偏(Bias)
尺度因子误差(Scale Factor Error)
安装误差(Misalignment)
积分过程中的数值误差
例如,一个低成本MEMS惯性测量单元(IMU)在无校正情况下,位置误差可在10分钟内累积至数公里。
2.1.3 应用场景
惯性导航因其高度自主性,在以下领域具有不可替代地位:
战略轰炸机与远程巡航导弹:穿越敌方防空识别区时拒绝使用GPS。
核动力潜艇:深海航行中无法接收卫星信号,依赖高精度惯导进行水下定位。
高超声速飞行器:极端振动与高温环境下对传感器稳定性要求极高。
无人机长航时任务:在GNSS拒止区域维持基本导航能力。
2.2 卫星导航系统(GNSS, Global Navigation Satellite System)
2.2.1 系统构成与工作原理
全球导航卫星系统(GNSS)通过接收来自多颗在轨卫星的无线电信号,利用信号传播时间乘以光速的方式计算用户位置。典型系统包括:
工作流程如下:
用户设备同时接收至少4颗卫星信号;
每颗卫星发送包含自身轨道参数和精确时间戳的信息;

通过最小二乘法求解三维位置与时间偏移。
2.2.2 性能特点
军用信号(如GPS P(Y)码、M码;北斗B3I)具有更高的码率、更强的抗干扰能力与加密机制,定位精度可达厘米至分米级。
2.2.3 在航空中的应用
民航运输:支持RNAV(区域导航)、RNP(所需导航性能)运行,实现灵活航路规划。
通航飞行:轻型飞机普遍配备GPS导航设备。
无人机精准作业:农业喷洒、电力巡检依赖RTK-GNSS实现厘米级定位。
空中交通监视:ADS-B广播位置信息的基础来源。
2.3 组合导航系统(Integrated Navigation System)
2.3.1 概念与必要性
单一导航方式各有局限:INS精度随时间下降,GNSS易被干扰。为此,现代飞行器普遍采用组合导航(Integrated Navigation),即通过滤波算法将多源导航信息进行融合,以提升整体性能。
最常见的组合形式为 INS/GNSS组合系统,其目标是在GNSS可用时校正INS漂移,在GNSS失效时由INS提供短时高精度推算。
2.3.2 卡尔曼滤波(Kalman Filter)在组合导航中的应用
卡尔曼滤波是一种递归状态估计算法,适用于线性动态系统的最优估计。在INS/GNSS组合中,其主要功能是:
将GNSS观测值作为外部量测输入;
对INS的误差状态(如位置误差、速度误差、陀螺零偏等)进行实时估计;
反馈校正INS输出,形成闭环修正。
状态向量通常定义为:
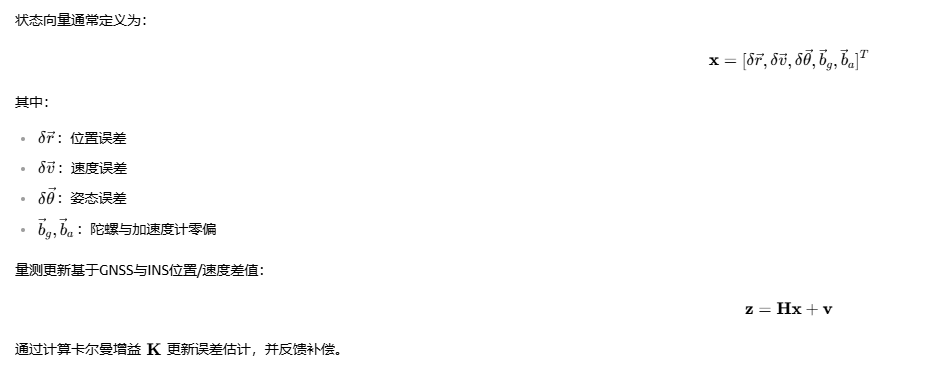 1
1
扩展卡尔曼滤波(EKF)、无迹卡尔曼滤波(UKF)以及粒子滤波(PF)也被广泛用于非线性系统建模。
2.3.3 实际系统架构示例
典型的INS/GNSS组合导航系统架构如下:
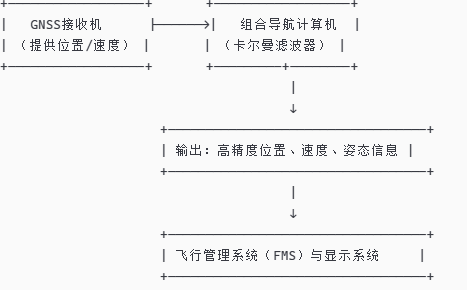
该系统在F-22、F-35、歼-20、C919等先进飞行器中均得到应用。
3 民用航空导航系统
除了上述自主与全球导航系统外,民用航空广泛依赖一系列地面辅助导航设施,构成完整的空域管理与进近引导体系。
3.1 VOR(甚高频全向信标)
基本功能
VOR(VHF Omnidirectional Range)工作于108–117.95 MHz频段,发射两个信号:
基准相位信号(全向发射)
可变相位信号(旋转方向图)
机载接收机通过比较两者的相位差,确定相对于地面台的磁方位角(0°~360°),精度约为±1°。
应用场景
终端区航路引导
制定标准进场程序(STAR)
与DME配合实现二维定位(VOR/DME)
尽管逐渐被RNAV取代,但在偏远地区仍具重要价值。
3.2 ILS(仪表着陆系统)
ILS(Instrument Landing System)是目前最常用的精密进近引导系统,专用于恶劣天气条件下保障安全降落。
系统组成
精度等级
ILS分为三类:
CAT I:决断高度60米,跑道视程550米
CAT II:决断高度30米,跑道视程300米
CAT IIIc:全自动着陆,无决断高度与能见度限制
局限性
受地形影响大,需保持发射路径无障碍
易受多路径效应干扰
安装与维护成本高
未来将逐步被GBAS(地基增强系统) 和 HUD/SVS(平视显示/合成视觉) 替代。
3.3 ADS-B(广播式自动相关监视)
ADS-B(Automatic Dependent Surveillance–Broadcast)代表新一代空管监视技术。
工作原理
飞行器利用GNSS确定自身位置,并通过1090ES或UAT链路,自动广播以下信息:
位置(经度、纬度、高度)
速度(地速、垂直速率)
航向、呼号、航班号
紧急状态标志
地面站接收后转发至空管中心,其他飞机也可接收用于防撞预警(TCAS增强)。
技术优势
更新率高(每秒1次)
精度优于传统雷达
支持空中交通态势共享(Cockpit Display of Traffic Information, CDTI)
推广现状
美国FAA于2020年强制要求ADS-B Out装备
欧洲EASA、中国民航局也相继出台法规
成为下一代空管系统(NextGen/SESAR)核心组成部分
4 关键技术挑战:高机动飞行中的惯性导航稳定性
4.1 问题提出
在战斗机执行空战机动(如高速转弯、翻滚、俯冲拉升)过程中,机体承受极大的加速度(可达9g以上)和角速度变化。传统机械陀螺或低成本MEMS器件在强振动与高过载环境下易产生零偏漂移、非线性响应甚至锁死现象,严重影响导航精度,甚至导致控制系统误判姿态。
4.2 解决方案:先进惯性传感器技术
为应对高动态飞行环境,现代高性能飞行器广泛采用两种先进惯性器件:
4.2.1 环形激光陀螺(RLG, Ring Laser Gyroscope)
工作原理: 基于萨尼亚克效应(Sagnac Effect)。在闭合光路中,两束相反方向传播的激光因载体旋转而产生频率差:

通过检测拍频即可反演角速度。
优势:
无活动部件,抗冲击能力强
启动快,响应频率高(>1kHz)
长期稳定性好(零偏稳定性可达0.001°/h)
典型应用:
F-16、F/A-18、歼-10等三代/四代战斗机
波音777、空客A330等大型民航客机惯导平台
局限性:
存在“闭锁效应”(Lock-in):低速旋转时信号微弱
需采用机械抖动(Dither)技术克服,引入噪声
4.2.2 光纤陀螺(FOG, Fiber Optic Gyroscope)
工作原理: 与RLG类似,但使用光纤绕制干涉环。利用保偏光纤构成马赫-曾德尔干涉仪,通过相位差检测旋转。
优势:
全固态结构,抗震性能极佳
无闭锁问题,低速性能优越
可实现小型化与低成本批量生产
技术指标对比(典型产品):
典型应用:
第五代战斗机(如F-35采用Honeywell HG1930 FOG)
无人机(如彩虹、翼龙系列)
导弹制导系统
4.3 战术意义
在现代空战中,战斗机常进入“GPS拒止”环境(敌方干扰或出于隐蔽需要)。此时,高性能RLG/FOG惯导系统成为维持态势感知与精确投放的唯一保障。例如:
在超视距打击中,依靠惯导维持目标区域定位;
在电子对抗中,配合被动制导系统完成“静默攻击”;
在编队飞行中,通过惯导+数据链实现相对导航。
因此,高精度、高稳定性的惯性传感器已成为衡量一国航空电子水平的重要标志。
5 发展趋势与未来展望
5.1 多源融合导航系统
未来导航系统将从“双源组合”(如INS/GNSS)向多源深度融合演进,构建具备高冗余、强鲁棒性的综合导航架构。典型的融合信息源包括:
视觉导航(Visual Navigation):利用机载摄像头或红外成像仪,通过图像匹配、特征点识别(如SIFT、ORB)实现地形辅助导航(TAN)或视觉里程计(VO),特别适用于无人机自主着陆与城市峡谷环境。
地磁导航(Magnetic Navigation):通过测量地球磁场强度与方向,结合地磁图库进行定位,在水下与地下场景中具有独特优势。
气压高度计与大气模型:辅助垂直定位,尤其在GNSS失效时提高高度保持精度。
量子惯性导航(Quantum Inertial Navigation):基于冷原子干涉原理的量子加速度计与陀螺仪,有望实现年漂移小于1米的超高精度,目前处于实验室验证阶段(如中国科大、美国DARPA项目)。
融合算法也将从传统的卡尔曼滤波扩展至人工智能驱动的智能滤波方法,如:
基于深度学习的姿态估计网络(如LSTM、Transformer)
强化学习用于动态权重分配
图神经网络(GNN)处理异构传感器拓扑关系
此类系统已在X-47B、忠诚僚机等无人平台上进行技术验证。
5.2 抗干扰与反欺骗能力增强
随着电子战强度升级,GNSS信号面临日益严峻的干扰与欺骗威胁。据公开报道,近年来中东、东欧等地多次发生大规模GPS干扰事件,影响民航与军用飞行安全。
为此,下一代导航系统正着力提升PNT(Positioning, Navigation, Timing)韧性:
抗干扰天线技术:
自适应调零阵列天线(Nulling Array Antenna)可动态抑制特定方向的干扰信号。
波束成形(Beamforming)技术增强卫星信号接收增益。
信号层防护:
使用军用M码、北斗B3频段等具有更强扩频增益与加密机制的信号。
多频点接收(如GPS L1+L2+L5)提升信号完整性检测能力。
欺骗识别算法:
基于载噪比(C/N₀)异常检测
多普勒频率一致性分析
信号到达角(AOA)比对
美国国防部已启动“Assured PNT”计划,目标是在完全拒止环境中维持至少30分钟的高精度导航能力。
5.3 新型空管与自主导航体系
随着城市空中交通(UAM)、电动垂直起降飞行器(eVTOL)和超大规模无人机群的兴起,传统导航体系面临容量与灵活性挑战。
未来发展方向包括:
(1)基于星基增强系统(SBAS)与地基增强系统(GBAS)的精密导航
SBAS(如WAAS、EGNOS、BDSBAS)通过地球同步卫星播发差分修正信息,将GNSS精度提升至亚米级。
GBAS 在机场部署基准站,支持CAT III类全自动着陆,替代传统ILS。
(2)去中心化自主导航网络
在“蜂群无人机”或“有人-无人编队”任务中,采用相对导航+分布式滤波架构:
以领航机为基准,其余成员通过UWB、TDOA或视觉相对测量维持编队构型;
使用一致性卡尔曼滤波(Consensus Filter)实现全局状态估计;
支持动态重构与故障隔离。
该技术已在美军“Skyborg”与“Loyal Wingman”项目中验证。
(3)空天地一体化导航
融合低轨卫星(LEO)通信与导航功能,构建通导一体(Integrated Sensing and Communication, ISAC)网络。例如:
SpaceX Starlink、中国“GW星座”具备潜在导航增强能力;
利用LEO卫星高密度覆盖与高速移动特性,提供备用PNT服务。
ITU已于2023年明确将非GSO卫星纳入全球导航体系补充框架。
6 结语
导航系统作为航空电子系统的核心子系统,经历了从机械指针到数字融合、从独立运行到网络协同的深刻变革。当前,以惯性导航为基础、卫星导航为主导、多源信息融合为趋势的现代导航体系,已成为保障飞行安全、提升作战效能的关键支撑。
在民用领域,ADS-B、RNP、GBAS等新技术推动空域资源高效利用,助力绿色航空与智慧空管发展;在军事领域,高精度RLG/FOG惯导与抗干扰GNSS使战斗机在复杂电磁环境中仍能维持精确制导与协同作战能力。特别是组合导航系统中卡尔曼滤波等数据融合算法的成熟应用,极大提升了系统整体性能与可靠性。
展望未来,导航技术将进一步向智能化、韧性化、自主化方向发展。量子惯性、视觉导航、人工智能滤波等前沿技术有望打破传统精度瓶颈;而星地一体、通导融合的新架构将重塑航空导航生态。与此同时,随着大国竞争加剧,PNT系统的安全性与自主可控性已成为国家战略科技能力的重要体现。
对于我国而言,北斗系统的全球组网完成标志着我们在GNSS领域实现自主可控,但在高端惯性器件(如超高精度RLG/FOG)、组合导航算法工程化、适航认证体系等方面仍需持续投入。推动产学研协同创新,加快核心传感器国产替代,发展适应复杂环境的综合导航解决方案,是我国建设航空强国的必由之路。
参考文献
[1] 张锐 等. 《现代航空电子系统技术》(第2版). 北京航空航天大学出版社, 2022.
[2] 李建刚. 《航空数据链系统原理与应用》. 国防工业出版社, 2021.
[3] 王漫 等. 《无人机通信与导航技术》. 电子工业出版社, 2023.
[4] 刘莉, 周锐. 《综合化航空电子系统设计》. 清华大学出版社, 2020.
[5] 赵杭生, 杨晨阳. 《航空通信与监视技术导论》. 人民邮电出版社, 2021.
[6] ICAO. Annex 10 – Volume I: Aircraft Navigation Systems. 8th Edition, 2023.
[7] RTCA. DO-373: Minimum Aviation System Performance Standards for Global Navigation Satellite Systems (GNSS). 2020.
[8] Titterton D., Weston J.L. Strapdown Inertial Navigation Technology (2nd ed.). The Institution of Engineering and Technology, 2004.
[9] Farrell J.A. Aided Navigation: GPS with High Rate Sensors. McGraw-Hill, 2008.
[10] U.S. Department of Defense. MIL-STD-1553B, Digital Time Division Command/Response Multiplex Data Bus, 1999.
[11] NASA. NextGen Communications and Navigation Strategic Plan, 2022.
[12] 中国卫星导航系统管理办公室. 《北斗卫星导航系统发展报告(2023年度)》. 2023.
[13] Johnson M. et al. "Design of High-Dynamic Inertial Navigation System for Combat Aircraft." IEEE Transactions on Aerospace, 2021, 58(4): 2341–2352.
[14] Zhang L. et al. "Deep Learning-based Fault Detection in INS/GNSS Integration." Sensors, 2022, 22(18), 6987.
[15] Honeywell. HGuide i300 Inertial Navigation Unit Datasheet. 2023.

